
|
|
|
|
universal.world File ReferenceExample of how to set a universal joint. More... Go to the source code of this file. Detailed Description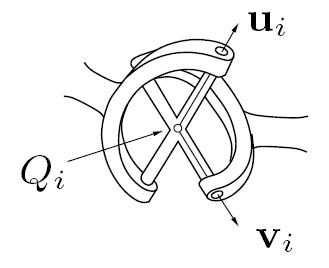
Example of how to set a universal joint including range limitations. A universal joint is consituted by two coincident revolute joints that form an angle of 90 degrees. The way to encode this joints is defining and implicit reference frame in between the two involved links (named ground and link in the example). The X unitary vector of this implicit reference frame is aligned with the axis The ranges of the universal joint are defined with two vectors,
Definition in file universal.world. |
 and the Y unitary vector with the
and the Y unitary vector with the  . The Z axis of this implicit link is the cross product of the X and Y unitary vectors.
. The Z axis of this implicit link is the cross product of the X and Y unitary vectors.