
|
|
|
|
Tworld Struct ReferenceInformation to generate equations from high level link descriptions. More...
Collaboration diagram for Tworld:
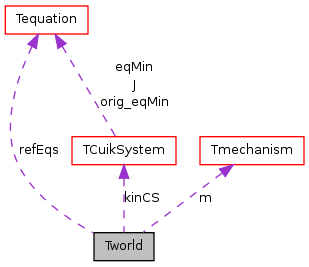
Detailed DescriptionStructure with all the necessary information to generate equations from high level link descriptions involving links and joints. Definition at line 74 of file world.h. Field Documentation
Stage of the world structure: EMPTY_WORLD, WORLD_WITH_GEOMETRY, WORLD_WITH_EQUATIONS. Latter stages imply the previous ones. Definition at line 75 of file world.h. Referenced by AnimateWorld(), DeleteWorld(), GenerateWorldEquationSystems(), GetGlobalInitialBox(), GetWorldSystemVars(), InitWorld(), MaxKinematicReduction(), MoveWorld(), PlotWorld(), PrintWorldCS(), and SplitGlobalBox(). The mechanism. Definition at line 79 of file world.h. Referenced by AddJoint2World(), AddLink2World(), Branch2Link(), DeleteWorld(), GenerateEquationsFromBranch(), GenerateKinTree(), GenerateWorldEquationSystems(), GetWorldDOF(), GetWorldLink(), GetWorldLinkID(), InitWorld(), InitWorldKinCS(), IsRevoluteBinaryLink(), MoveWorld(), and PlotWorld().
Number of links in the mechanism. Definition at line 81 of file world.h. Referenced by AddLink2World(), Branch2Link(), DeleteWorld(), GenerateKinTree(), GenerateWorldEquationSystems(), GetWorldNLinks(), InitWorld(), InitWorldKinCS(), and MoveWorld().
Number of convex bodies forming the links. Definition at line 82 of file world.h. Referenced by AddLink2World(), GetWorldNConvexBodiesInLinks(), and InitWorld().
Number of joints. Definition at line 83 of file world.h. Referenced by AddJoint2World(), GenerateKinTree(), GetWorldNJoints(), InitWorld(), and InitWorldKinCS().
Sum of the maximum coordinate values for all objects in the mechanism. Used to define the ranges of coordinate and separating plane variables. Definition at line 84 of file world.h. Referenced by GenerateEquationsFromBranch(), GenerateWorldEquationSystems(), and InitWorldKinCS(). The cuiksystem. Definition at line 87 of file world.h. Referenced by AnimateWorld(), DeleteWorldCS(), GenerateTransEquationsFromBranch(), GenerateWorldEquationSystems(), GetGlobalInitialBox(), GetWorldSystemVars(), InitWorldCS(), InitWorldKinCS(), MaxKinematicReduction(), MoveWorld(), PrintWorldCS(), and SplitGlobalBox(). Array of booleans with as many elements as variables has the kinCS and where each entry is TRUE if the corresponding variable is a system variable. Definition at line 89 of file world.h. Referenced by DeleteWorld(), GenerateWorldEquationSystems(), InitWorld(), MaxKinematicReduction(), and MoveWorld(). Three equations for each link giving the position of the frame of reference of each link in the global frame of reference. They define the translations using rotation variables and fixed vectors. Definition at line 99 of file world.h. Referenced by DeleteWorld(), GenerateWorldEquationSystems(), InitWorld(), and MoveWorld(). The documentation for this struct was generated from the following file:
| |||||||||||||||||||||||||