
|
|
|
|
Serial6RRX60.world File ReferenceAn industrial Serial6R mechanism. More... Go to the source code of this file. Detailed Description
This file is an example of how to model real robots in the CuikSuite. The Staubli RX60 robot arm is a 6R loop with the following Denavit-Hartenberg parameters:
The Denavit-Hartenberg parameters for this robot can be easily interpreted with the help of this figure 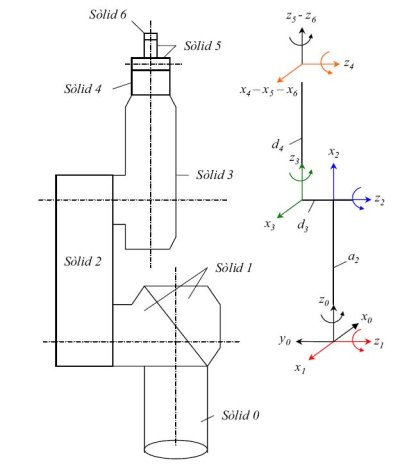
To match this figure with the formulation, take into account that in the formulation Solid0 is the base link and Solid6 is the EndEfector plus the hand (that is fixed with respect to the EndEfector) The parameters in the last row of the table are given by the desired position for the hand at the end of the robot and the robot's base. In the formulation this is not given in the form of Denavit-Hartenberg parameters but directly as an homogeneous transform from the base to the hand. Note that the range limitations of the RX60 are not introduced in this formulation (althoug it is easy to do it).
See DoubleButterfly for an extensive step-by-step explanation of how to perform position analysis and path planning within the CuikSuite. Next, we briefly enumerate those steps:
Definition in file Serial6RRX60.world. |







