A. Ortega, M. Silva, E.H. Teniente, R. Ferreira, A. Bernardino, J. Gaspar, J. Andrade-Cetto. Calibration of an Outdoor Distributed Camera Network with a 3D Point Cloud. Sensors 14.8 (2014): 13708-13729. [ .pdf ] [ .bib ]
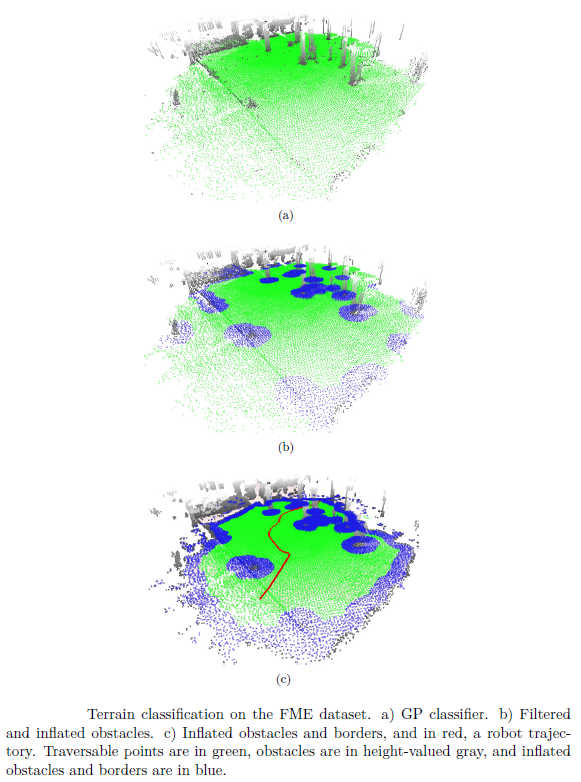
A. Santamaria, E.H. Teniente, M. Morta, and J. Andrade-Cetto. Terrain classification in complex 3D outdoor environments. Journal of Field Robotics 32.1 (2015): 42-60. [ .pdf ] [ .bib ]
E.H. Teniente and J. Andrade-Cetto. HRA*: Hybrid randomized path planning for complex 3D environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 1766-1771, Tokyo, November 2013. [ .pdf ] [ .bib ]
R. Valencia , Ernesto H. Teniente, E. Trulls, J. Andrade-Cetto, 3D Mapping for Urban Service Robots,
J. Andrade-Cetto, A. Ortega, Ernesto H. Teniente, E. Trulls, R. Valencia, and A. Sanfeliu. Combination of distributed camera network and laser-based 3D mapping for urban service robotics. In Workshop on Network Robots Systems IEEE/RSJ International Conference on Intelligent Robots and Systems pages 69-80, October 2009, St. Louis, Missouri. [ .pdf ] [ .bib ]
A. Ortega, B. Dias, Ernesto H. Teniente, A. Bernardino, J. Gaspar and J. Andrade-Cetto, Calibrating an outdoor distributed camera network using laser range finder data 3D mapping for urban service robots, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems pages 303-308, October 2009, St. Louis, Missouri.[ .pdf ] [ .bib ]
Ernesto H. Teniente and J. Andrade-Cetto, FaMSA: Fast Multi-Scan Alignment with Partially Known Correspondences, European Conference on Mobile Robotics September 2011, Orebro, Sweeden.[ .pdf ] [ .bib ]
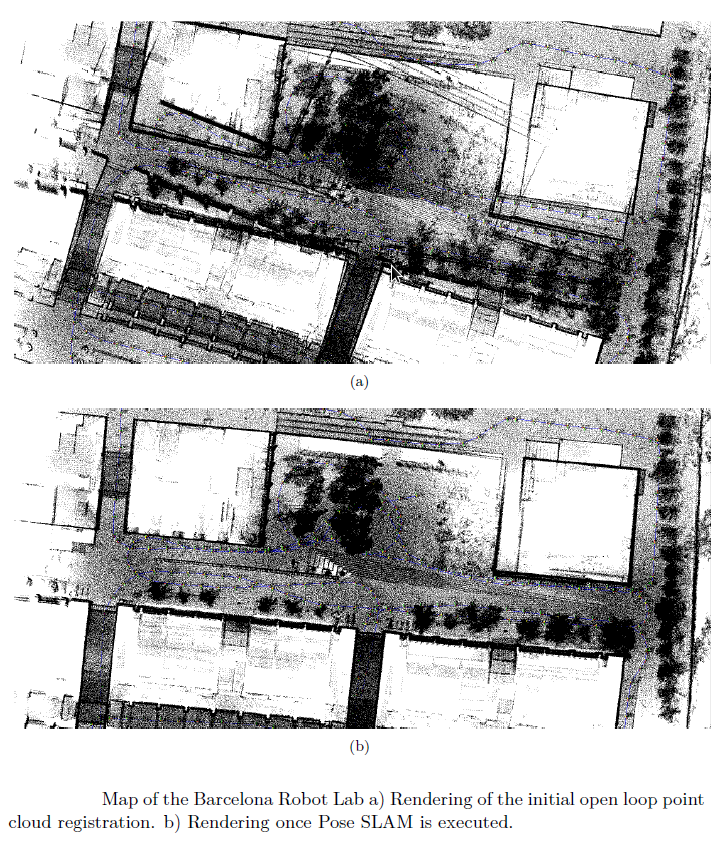
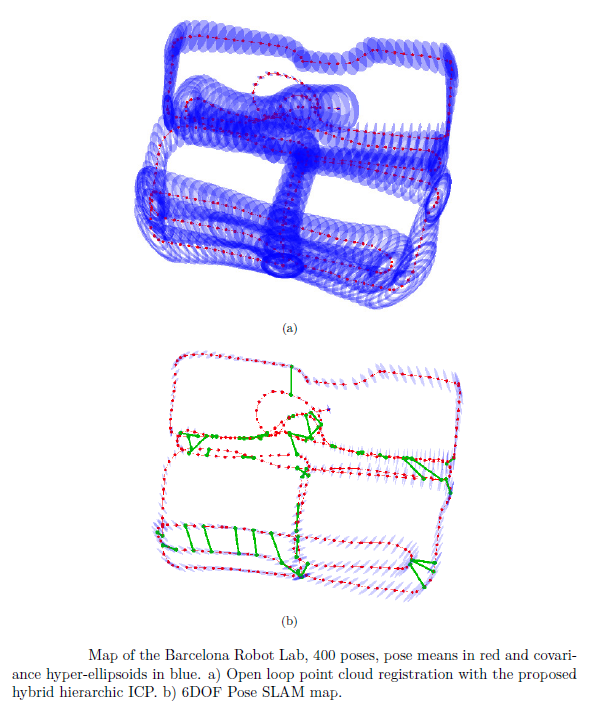
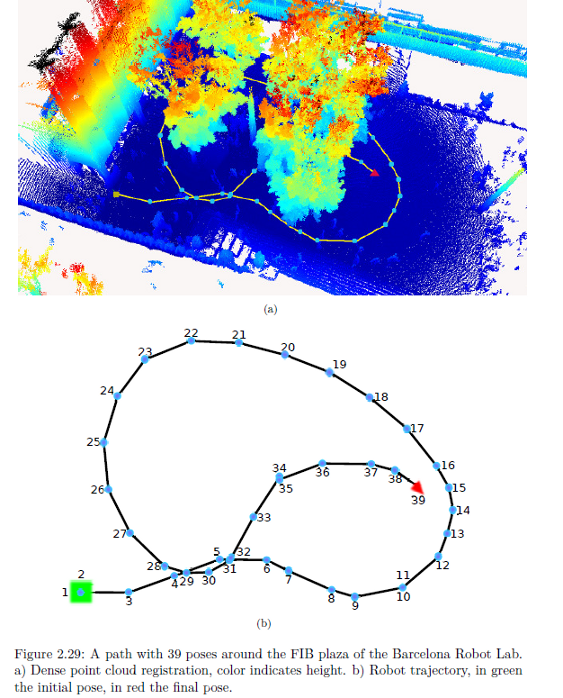
Ernesto H. Teniente, Rafael Valencia and Juan Andrade-Cetto, Dense Outdoor 3D Mapping and Navigation with Pose SLAM, Work Shop Robot'11 November 2011, Sevilla, Spain.[ .pdf ] [ .bib ]
E.H. Teniente and J. Andrade-Cetto, Registration of 3D Points Clouds for Urban Robot Mapping,Technical Report IRI-DT-01-02, Institut de Robotica i Informatica Industrial, Universitat Politecnica de Catalunya, Octuber 2008. [ .pdf ] [ .bib ]
J. Andrade-Cetto, M. Morta, P. Grosh, E.H. Teniente, Dispositivo medidor de distancia y magnitudes omnidireccional. Patent filed July 4th, 2012 (P201231044).pdf ] [ .bib ]