Research Project
ANNA: Supervised learning of industrial scenes by means of an active vision equipped mobile robot.
Type
National Project
Start Date
28/12/2001
End Date
27/12/2004
Project Code
DPI 2001-2223
Staff
-
-
Moreno, Francesc
Researcher
-
Andrade, Juan
Researcher
Project Description
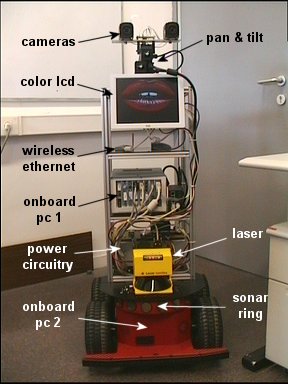
The primary goal of the project is the development of a mobile robot mounted active vision system capable of learning and recognizing objects in an industrial setting. The system should be able to learn its surroundings in a supervised form, as well as the more relevant objects that allow for the completion of a particular task.
By incorporating several perception sensors (computer vision, proximity sensors, acoustic sensors), the system should be capable of producing a map of the environment, in which the user can select, via a graphical user interface or via voice commands, the location of selected objects for learning and recognition.
The mobile robot would autonomously navigate to the selected object, and take snapshots of the object from different viewpoints, thus capturing invariant appearance and geometric object features, as well as acoustic signatures, for object characterization. Once a map of the environment has been created, and the relevant objects have been learned, the robot should be able to navigate through the environment identifying the learned objects; even if there have been significant changes in the environment from the learning phase to the recognition phase. This is, the system must be able to react to dynamic or changing environments by keeping at all times an updated version of a continuously learned environment map.
The system will be designed for a somewhat structured but changing environment in mind. This project is the continuation of a previous CICYT project assigned to the main investigator on 1998, in which we developed robust learning techniques for a mobile robot called MARCO using active vision.In this project we will develop robust techniques for the extraction and learning of invariant image features based on color, texture, and geometry.
Object representation will be enriched with the signatures coming from position and acoustic sensors. We will come up with the necessary techniques for the fusion of information from the various perception sensors. We will extend our group's contributions on state of the art object model representation techniques based on probabilistic graphs, particularly on function described graphs. We will further investigate algorithms for probabilistic graph synthesis and graph matching for the learning and recognition of object models, respectively. We will develop a dynamic and scale-invariant scene representation model (map) that will preserve relational information among the salient landmarks in the environment, and that allows for the annotation of context-based information by the user. In order to test our map building and recognition algorithms as well as our object model learning and recognition methods, we will develop the required reactive navigation behaviors for obstacle avoidance, as well as deliberate (map based) behaviors that allow for the planning of more complex navigation trajectories. We will also come up with efficient probabilistic local and global self-localization methods according to our environment representation model.
Project Publications
Journal Publications
-
J. Andrade-Cetto and A. Sanfeliu. The effects of partial observability when building fully correlated maps. IEEE Transactions on Robotics, 21(4): 771-777, 2005.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
J. Andrade-Cetto and A. Sanfeliu. Concurrent map building and localization on indoor dynamic environments. International Journal of Pattern Recognition and Artificial Intelligence, 16(3): 361-374, 2002.
Abstract
Info
PDF
Conference Publications
-
J. Scandaliaris, R. Alquézar Mancho, J. Andrade-Cetto, J. Aranda, J. Climent, A. Grau, J. M. Mirats Tur, F. Moreno-Noguer, F. Serratosa, J. Vergés, T. Vidal-Calleja and A. Sanfeliu. Research at the learning and vision mobile robotics group 2004-2005, 1st Spanish Congress on Informatics, 2005, Granada, Espanya, pp. 1-7, CEDI.
Abstract
Info
PDF
-
F. Moreno-Noguer, A. Sanfeliu and D. Samaras. Integration of conditionally dependent object features for robust figure-background segmentation, 10th International Conference on Computer Vision, 2005, Beijing, Xina, pp. 1713-1720, 2005, IEEE, Barcelona, Espanya.
Abstract
Info
PDF
-
T. Vidal-Calleja, J. Andrade-Cetto and A. Sanfeliu. Conditions for suboptimal filter stability in SLAM, 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2004, Sendai, Japan, in Intelligent Robots and Systems, pp. 27-32, 2004, IEEE, Barcelona, Espanya.
Abstract
Info
PDF
-
J. Andrade-Cetto. Perception issues in mobile robotics, 5º Congreso Internacional en Control, Instrumentación Virtual y Sistemas Digitales, 2004, Mèxic D.F., Mèxic, in Avances en control, instrumentación virtual, sistemas digitales, arquitectura de computadoras, robóticas y procesamiento de señales, pp. 1-22, 2004, Instituto Politécnico Nacional, Mèxic D.F., Mèxic.
Abstract
Info
PDF
-
F. Moreno-Noguer, A. Sanfeliu and D. Samaras. Fusion of a multiple hypotheses color model and deformable contours for figure ground segmentation in dynamic enviroments, 2004 CVPR Workshop on Articulated and Non-Rigid Motion, 2004, Washington, pp. 13-14, 2004, UPC-CSIC.
Abstract
Info
PDF
-
F. Moreno-Noguer and A. Sanfeliu. Integration of shape and a multihypotheses fisher color model for figure-ground segmentation in non-stationary environments, 17th International Conference on Pattern Recognition, 2004, Cambridge, England, pp. 771-774, 2004, IEEE, Barcelona, Espanya.
Abstract
Info
PDF
-
F. Moreno-Noguer and A. Sanfeliu. Adaptive color model for figure-ground segmentation in dynamic environments, 9th Iberoamerican Congress on Pattern Recognition, 2004, Puebla, Mèxic, in Progress in Pattern Recognition, Image Analysis and Applications, Vol 3287 of Lecture Notes in Computer Science, pp. 37-44, 2004, Springer, Berlin, Alemanya.
Abstract
Info
PDF
-
J. Andrade-Cetto, A. Grau, J. Climent, F. Moreno-Noguer, R. Alquézar Mancho, F. Serratosa, J. Vergés, Y. Bolea and A. Sanfeliu. Research at the learning and vision mobile robotics group, 1a Jornada de Recerca en Automàtica, Visió i Robòtica, 2004, Barcelona, Espanya, pp. 117-128, 2004, UPC, Barcelona, Espanya.
Abstract
Info
PDF
-
T. Vidal-Calleja, J. Andrade-Cetto and A. Sanfeliu. Estimator stability analysis in SLAM, 5th IFAC Symposium on Intelligent Autonomous Vehicles, 2004, Lisbon, Portugal, pp. 1-6, 2005, Elsevier.
Abstract
Info
PDF
-
F. Moreno-Noguer, J. Andrade-Cetto and A. Sanfeliu. Fusion of color and shape for object tracking under varying illumination, 1st Iberian Conference on Pattern Recognition and Image Analysis, 2003, Port d'Andratx, in Pattern Recognition and Image Analysis, Vol 2652 of Lecture Notes in Computer Science, pp. 580-588, 2003, Springer, Berlin, Alemanya.
Abstract
Info
PDF
-
J. Andrade-Cetto and A. Sanfeliu. Temporal landmark validation in CML, 2003 IEEE International Conference on Robotics and Automation, 2003, Taipei, Taiwan, pp. 1576-1582, IEEE.
Abstract
Info
PDF
-
J. Andrade-Cetto, F. Moreno-Noguer, R. Alquézar Mancho, J. Aranda, A. Grau, E. Muñoz, E. Staffetti, F. Serratosa, J. Vergés, T. Vidal-Calleja and A. Sanfeliu. Learning and vision mobile robotics group research report 2002-2003, XXIV Jornadas de Automática, 2003, León, Spain, pp. 1-7, 2003, CEA - IFAC, León, Espanya.
Abstract
Info
PDF
-
J. Andrade-Cetto and A. Sanfeliu. Concurrent map building and localization with landmark validation, 16th International Conference on Pattern Recognition, 2002, Quebec, Canadà, pp. 693-696, 2002, IEEE.
Abstract
Info
PDF
-
F. Moreno-Noguer, A. Tarrida, J. Andrade-Cetto and A. Sanfeliu. 3D real-time head tracking fusing color histograms and stereovision, 16th International Conference on Pattern Recognition, 2002, Quebec, Canadà, pp. 368-371, 2002, IEEE.
Abstract
Info
PDF
Other Publications
-
J. Andrade-Cetto and A. Sanfeliu. Environment learning for indoor mobile robots. A stochastic state estimation approach to simultaneous localization and map building. Volume 23 of Springer Tracts in Advanced Robotics. Springer, 2006.
Abstract
Info
-
J. Andrade-Cetto. Environment learning for indoor mobile robots. UPC, 2003.
Abstract
Info
-
J. Andrade-Cetto, T. Vidal-Calleja and A. Sanfeliu. Stochastic state estimation for simultaneous localization and map building in mobile robotics. In Cutting Edge Robotics, 223-242. Advanced Robotic Systems Press, 2005.
Abstract
Info
PDF
-
A. Checa, J. Andrade-Cetto and A. Sanfeliu. Construcció de mapes per robots mòbils equipats amb sensors làser de profunditat. Technical Report IRI-DT-03-01, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2003.
Abstract
Info
PDF
-
J. Andrade-Cetto. The Kalman filter. Technical Report IRI-DT-02-01, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2002.
Abstract
Info
PDF
-
F. Moreno-Noguer. Desenvolupament d'un sistema d'estereovisió per un robot mòbil. Technical Report 01-01, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2001.
Abstract
Info


Follow us!