Research Project
RobCab: Control strategies for cable-driven robot for low-gravity simulation
Type
National Project
Start Date
01/01/2015
End Date
31/12/2018
Project Code
DPI2014-57220-C2-2-P
Staff
-
-
Thomas, Federico
Principal Investigator
-
Ruiz de Angulo, Vicente
Researcher
-
Ros, Lluís
Researcher
-
Grosch, Patrick John
Researcher
-
Rull, Aleix
PhD Student
-
Bordalba, Ricard
Member
-
Celaya, Enric
Member
Project Description
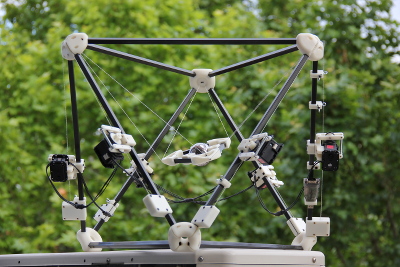
In the past few years, cable-driven parallel mechanisms have been increasingly studied since they are low-cost, light-weight robots that have all the required physical features in industry regarding the load capacity or the workspace size. Up to now, in most applications involving cable-driven robots, the platform moves the load freely in open space at high speeds and without any force feedback. However, a fully autonomous and safe cable-driven robot must be able to properly react to the contacts between the load and the environment. Thus, the objective of this project is to design and build a force-controlled cable-driven robot and to use it to simulate low gravity conditions, such as those of the underwater environments. The main scientific and technological contribution of this project will be within the frame of robots with force-position hybrid control. Despite their relevance, there are very few commercial robots with such hybrid controllers and, the one proposed herein will be the first cable-driven robot with such type of control.
Beside the simulation of low gravity conditions, such novel devices would easily find applications in many areas. The easy transportation of heavy loads is a demanding necessity in civil infrastructure services, disaster management, automated warehouses, and manufacturing companies, just to name a few. Moreover, a low-gravity simulation such as the one proposed in this project, can be used, or instance, in the rehabilitation of lower limb injuries, where the robot movements and the interaction forces with the environment should be soften.
The project addresses the design of a cable-driven robot, its physical construction, and the development of all the modeling and control tools necessary to properly simulate and command it.
Project Publications
Journal Publications
-
S. Sarabandi and F. Thomas. A survey on the computation of quaternions from rotation matrices. Journal of Mechanisms and Robotics, 11(2): 021006, 2019.
 Abstract
Abstract
 Info
Info
 PDF
PDF
-
E. Celaya. Solution intervals for variables in spatial RCRCR linkages. Mechanism and Machine Theory, 133: 481-492, 2019.
Abstract
Info
PDF
-
A. Perez and F. Thomas. On Cayley's factorization of 4D rotations and applications. Advances in Applied Clifford Algebras, 27(1): 523-538, 2017.
Abstract
Info
PDF
-
J.M. Porta and F. Thomas. Closed-form position analysis of variable geometry trusses. Mechanism and Machine Theory, 109: 14-21, 2017.
Abstract
Info
PDF
-
J.M. Porta and S. Hernández. Path planning for active tensegrity structures. International Journal of Solids and Structures, 78: 47-56, 2016.
Abstract
Info
PDF
-
J.M. Porta, A. Rull and F. Thomas. Sensor localization from distance and orientation constraints. Sensors, 16(7): 1096, 2016.
Abstract
Info
PDF
-
F. Moreno-Noguer and J.M. Porta. A Bayesian approach to simultaneously recover camera pose and non-rigid shape from monocular images. Image and Vision Computing, 52: 141-153, 2016.
Abstract
Info
PDF
-
G. Alexandre, J. Cristophe, V. Ruiz de Angulo and C. Torras. Variable symmetry breaking in numerical constraint problems. Artificial Intelligence, 229: 105-125, 2015.
Abstract
Info
PDF
Conference Publications
-
R. Bordalba, J.M. Porta and L. Ros. A singularity-robust LQR controller for parallel robots, 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018, Madrid, Spain, pp. 270-276.
Abstract
Info
PDF
-
R. Bordalba, L. Ros and J.M. Porta. Randomized planning of dynamic motions avoiding forward singularities, 16th International Symposium on Advances in Robot Kinematics, 2018, Bologna, Italy, in Advances in Robot Kinematics 2018, Vol 8 of Springer Proceedings in Advanced Robotics, pp. 170-178, 2019.
Abstract
Info
PDF
-
S. Sarabandi, A. Perez-Gracia and F. Thomas. Singularity-free computation of quaternions from rotation matrices in E4 and E3, 7th Conference on Applied Geometric Algebras in Computer Science and Engineering, 2018, Campinas, Brasil.
Abstract
Info
PDF
-
J.M. Porta, S. Sarabandi and F. Thomas. Angle-bound smoothing with applications in kinematics, 5th IFToMM Asian Conference on Mechanism and Machine Science, 2018, Bengaluru, India, in Mechanism and Machine Science, Vol XXXIV of Lecture Notes in Mechnical Engineering, pp. 747-759, 2020, Springer.
Abstract
Info
PDF
-
J.M. Porta and F. Thomas. The forward kinematics of doubly-planar Gough-Stewart platforms and the position analysis of strips of tetrahedra, 16th International Symposium on Advances in Robot Kinematics, 2018, Bologna, Italy, in Advances in Robot Kinematics 2018, Vol 8 of Springer Proceedings in Advanced Robotics, pp. 124-132, 2019.
Abstract
Info
PDF
-
J.M. Porta and F. Thomas. Yet another approach to the Gough-Stewart platform forward kinematics, 2018 IEEE International Conference on Robotics and Automation, 2018, Brisbane, Australia, pp. 974-980.
Abstract
Info
PDF
-
S. Sarabandi and F. Thomas. Accurate computation of quaternions from rotation matrices, 16th International Symposium on Advances in Robot Kinematics, 2018, Bologna, Italy, in Advances in Robot Kinematics 2018, Vol 8 of Springer Proceedings in Advanced Robotics, pp. 39-46, 2019.
Abstract
Info
PDF
-
S. Sarabandi, P. Grosch, J.M. Porta and F. Thomas. A reconfigurable asymmetric 3-UPU parallel robot , 4th International Conference on Reconfigurable Mechanisms and Robots, 2018, Delft, Netherlands, pp. 1-8.
Abstract
Info
PDF
-
R. Bordalba, L. Ros and J.M. Porta. Randomized kinodynamic planning for constrained systems, 2018 IEEE International Conference on Robotics and Automation, 2018, Brisbane, Australia, pp. 7079-7086.
Abstract
Info
PDF
-
N. Rojas and F. Thomas. Forward kinematics of the general triple-arm robot using a distance-based formulation, 7th International Workshop on Computational Kinematics, 2017, Futuroscope-Poitiers, France, in Computational Kinematics, Vol 50 of Mechanisms and Machine Science, pp. 257-264, 2018, Springer.
Abstract
Info
PDF
-
F. Thomas and A. Perez. A new insight into the coupler curves of the RCCC four-bar linkage, 7th International Workshop on Computational Kinematics, 2017, Futuroscope-Poitiers, France, in Computational Kinematics, Vol 50 of Mechanisms and Machine Science, pp. 552-559, 2018, Springer.
Abstract
Info
PDF
-
R. Bordalba, L. Ros and J.M. Porta. Randomized kinodynamic planning for cable-suspended parallel robots, 3rd International Conference on Cable-Driven Parallel Robots, 2017, Quebec, Vol 53 of Mechanisms and Machine Science, pp. 195-206, Springer.
Abstract
Info
PDF
-
F. Thomas and J.M. Porta. Closure polynomials for strips of tetrahedra, 15th International Symposium on Advances in Robot Kinematics, 2016, Grasse, France, in Advances in Robot Kinematics, Vol 4 of Springer Proceedings in Advanced Robotics, pp. 303-312, 2018, Springer.
Abstract
Info
PDF
-
A. Rull, J.M. Porta and F. Thomas. Distance bound smoothing under orientation constraints, 2015 IEEE International Conference on Robotics and Automation, 2015, Seattle, WA, USA, pp. 1431-1436.
Abstract
Info
PDF
Other Publications
-
O. Bohigas, M. Manubens and L. Ros. Singularities of Robot Mechanisms: Numerical Computation and Avoidance Path Planning. Volume 41 of Mechanisms and Machine Science. Springer, 2017.
Abstract
Info
-
J.M. Porta, N. Rojas and F. Thomas. Distance geometry in active structures. In Mechatronics for Cultural Heritage and Civil Engineering, 115-136. Springer, 2018.
Abstract
Info
PDF
-
R. Bordalba, J.M. Porta and L. Ros. Kinodynamic planning on constraint manifolds. Technical Report IRI-TR-17-01, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2017.
Abstract
Info
PDF
-
I. Dauzickaite. Detection of permutation symmetries in numerical constraint satisfaction problems. Technical Report IRI-TR-17-04, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2017.
Abstract
Info
PDF
-
P. Mestres and V. Ruiz de Angulo. Constraint symmetries. Technical Report IRI-TR-17-05, Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 2017.
Abstract
Info
PDF


Follow us!