The DLR-II robot hand hoding a needle with 3 fingers.
This example is the same as wafr.world but without considering joint limits and de-coupling the joints in each finger (except for a couple of fingers that are coupled adding some extra equations). This example is basically used to generate the atlas of a complex manifold.
The key data for this problem are:
| Ambient space dimension | 62 |
| Configuration space dimension | 2 |
| Execution time with bin/cuikatlas (in secons) | 917 |
This example is treated following this steps (from the main CuikSuite folder):
- Set the parameters: Different atlas can be obtained using different representations (vales for REPRESENTATION). In principle we prepared this example to work with REPRESENTATION = LINKS.
- Generate the equations:
- Add equations to reduce dimensionality: So that the dimension of the manifold is 2 and it can be easily visualized. We basically introduce couplings between the degrees of freedom of a couple of fingers. This coupling actually exists in the real hand.
- bin/cuikmerge _reduced examples/RobotHand/wafr_no_limits examples/RobotHand/wafr_no_limits_extra
- ln -s wafr_no_limits_extra.links examples/RobotHand/wafr_no_limits_extra_reduced.links
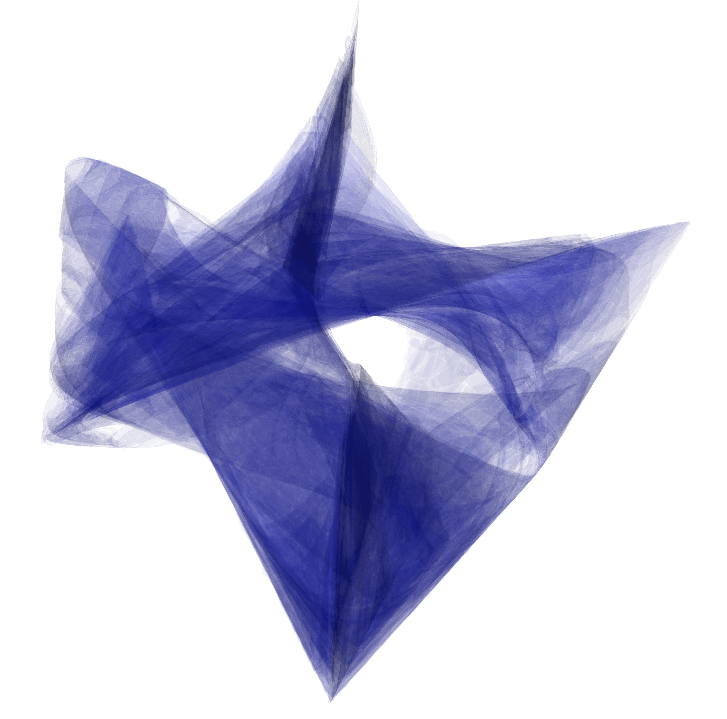
- Obtain the atlas: This can take long (about 15 minutes) and generates about 117000 charts.
- Plot the atlas
- Visualize the (projected) atlas
- geomview examples/RobotHand/wafr_no_limits_reduced_atlas.gcl
This example includes bifurcations. Thus by setting DETECT_BIFURCATIONS to 1 you will obtain a larger atlas (this would take long to compute, about 25 min).
The atlas without bifurcations looks like this:
Definition in file wafr_no_limits.world.

Follow us!