|
Wheelie Directory Reference Detailed Description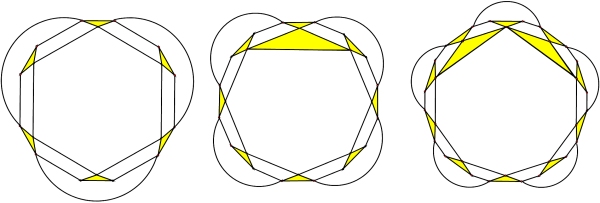
IntroductionAll members of the Wheelie family have two particularities:
The first property derives from the fact that the linkage graphs are planar and triconnected and, by the Owen-Power theorem, this implies their solution cannot be found by ruler-and-compass methods [Owen 2007]. The second property can be proved by showing that such graphs only contain a single triconnected component. Thus, solvers based on ruler-and-compass methods or on modular kinematics cannot solve such linkages. Therefore, the Wheelie linkages are a perfect scalable testbed for general position analysis algorithms. Geometry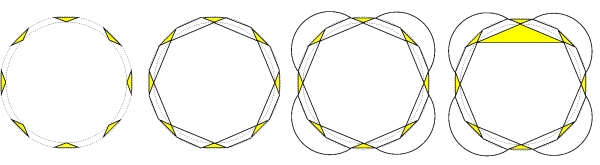
As it can be seen in the figure above, a T-Wheelie linkage is formed by a loop of T equally sized isosceles triangles generated from two concentric circles and where the triangles are connected with the following pattern:
ProcessPlease, see the individual files for the instructions on how to process them:
StatisticsCharacteristics of the problem:
Here you have the statistics about the execution (on an Intel Core i7 at 2.9 Ghz).
The execution times can be significantly reduced executing cuik on a cluster of computers. This is easy using the rmpicuik script (assuming that you have a properly configured cluster of computers). ResultsThese are the 19 valid configuraions of the Wheelie6.world problem: 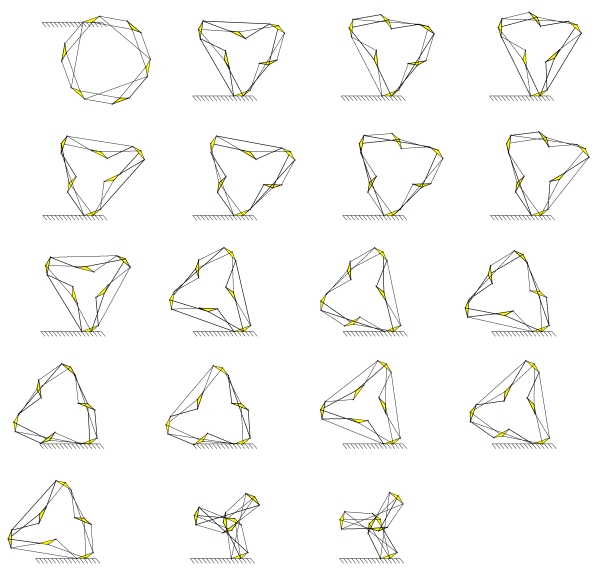
This is a projection of the one-dimensional configuration space of the Wheelie6mobile.world problem. 
Actually, this configuration space contains 16 connected components, corresponding to 16 different assembly modes of the linkage. One of such modes is rigid, and the remaining ones are mobile. The mobile modes show up as disjoint closed curves in the above plot (they are better appreciated in the 3d plot, as seen with geomview). References
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Follow us!