|
Serial6RRX60.world File Reference Detailed Description
IntroductionThis file is an example of how to model real robots in the CuikSuite. The Staubli RX60. GeometryDenavit-Hartenberg parameters (in meters) for these parameters are:
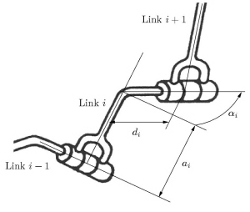
The Denavit-Hartenberg parameters for this robot can be easily interpreted with the help of this figure 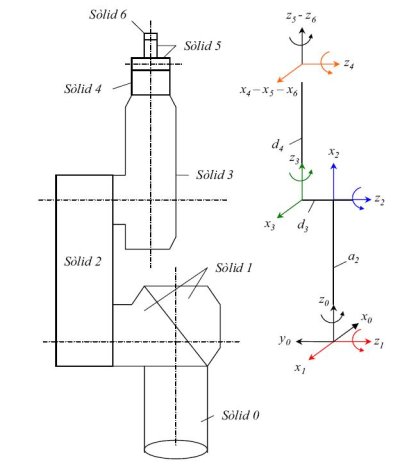
To match this figure with the formulation, take into account that in the formulation Solid0 is the base link and Solid6 is the EndEfector. The parameters in the table do not specify the loop closure that must be defined for each problem. Note that the range limitations of the RX60 are not introduced in this formulation (althoug it is easy to do it). ProcessThis example is treated following these steps (from the main CuikSuite folder):
StatisticsCharacteristics of the problem:
Here you have the statistics about the execution (on an Intel Core i7 at 2.9 Ghz).
ResultsThis is one of the configurations got with the instructions previously given: 
Definition in file Serial6RRX60.world. |





Follow us!