|
RobotHand.world File Reference Detailed Description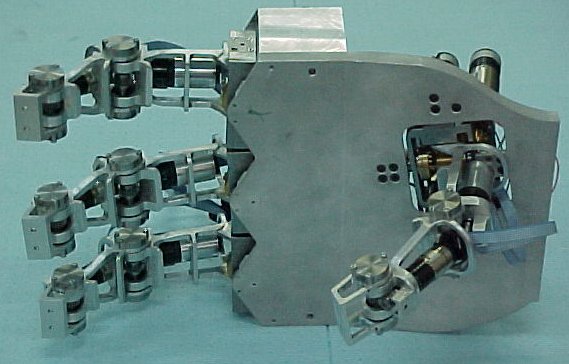
IntroductionThis is an instance of a 4 fingered robot hand with a particular geometry that corresponds to the MA-I developed at IOC. Please, see our IJRR-11 for more information on the use of CuikSuite in the context of grasping. Geometry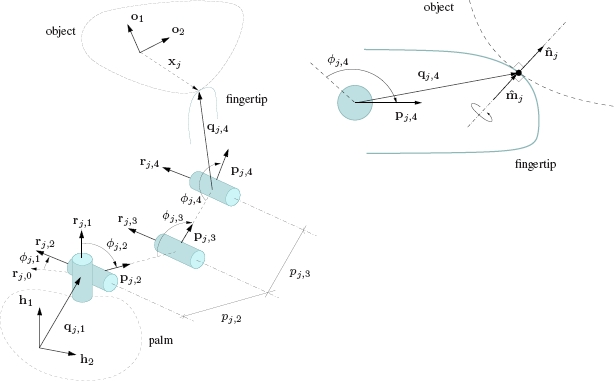
The geometry for this hand is given by the following anchor points of the fingers on the hand (
and by the length of the phalanges (
The ranges for the universal joint attaching finger The grasp is defined given the contact points and normals on the fingertips
and on the object
ProcessThis example is treated following this steps (from the main CuikSuite folder):
StatisticsCharacteristics of the problem:
Here you have the statistics about the execution (on a grid with 160 processors). The process stops as soon as one solution is found.
ReferencesThis is a screenshot of the configuration we obtained: 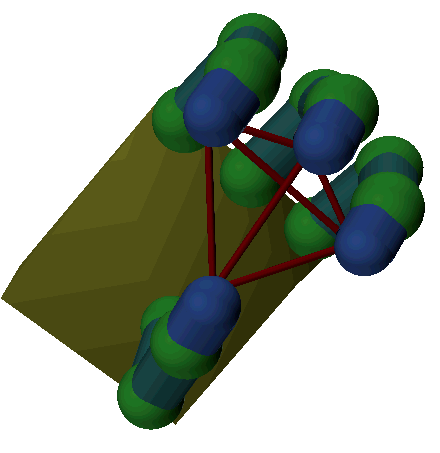
Definition in file RobotHand.world. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 )
) )
) 


 )
) )
)  and
and  and the limits for the two revolute joints in-between the phalanx
and the limits for the two revolute joints in-between the phalanx  are given by the minimum and maximum values for
are given by the minimum and maximum values for  .
.











{kind=link}
Follow us!