A planar five bar mechanism. This is like the four bar mechanism but with one bar more. This has a bidimensional soluiton set.
This example is treated following this steps (from the main CuikSuite folder):
- Generate the equations: Ensure that the paremeter REPRESENTATION is set to LINKS (or just not set). When planning it is typically set to JOINTS which is not valid for bin/cuik. Morover, ensure that MAX_NEWTON_ITERATIONS is set to 0 (or just not set) to avoid a slow Newton process for each processed box. This is useful when searching just for one solution. Then, execute:
- Solve the positional analysis problem:
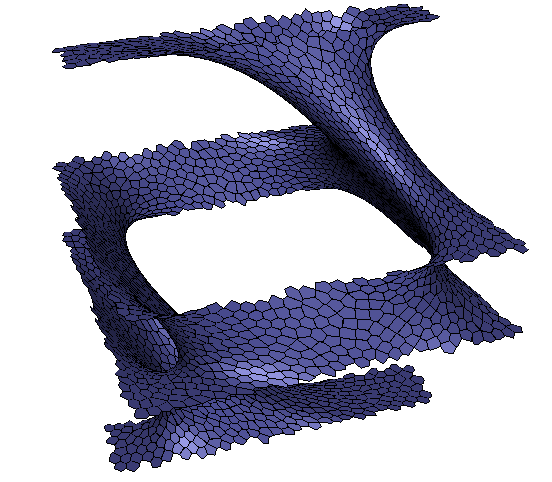
- Plot and visualize the configuration space (you will see the two one-dimensional solution sets):
- bin/cuikplot3d examples/FiveBars/FiveBars 3 7 15 0 fb.gcl
- geomview fb.gcl
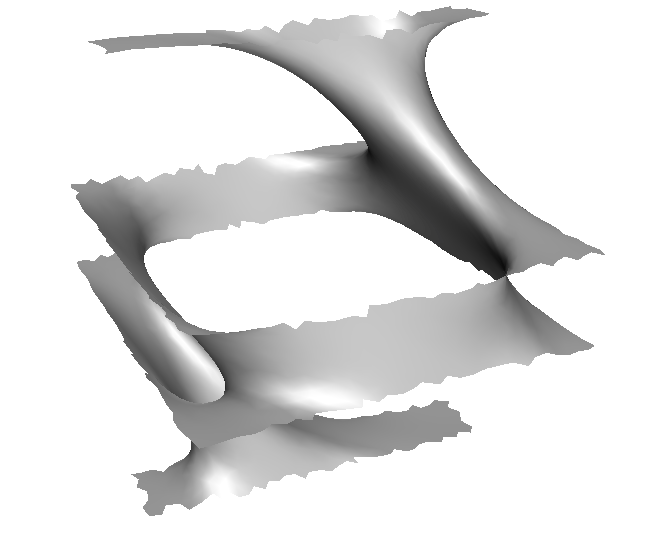
- Generate and visualize the atlas This is an alternative way to isolate the configuration space However, the atlas is limited to the connected component including the initial point (in this case there is no difference since the configuration space only has one component). Ensure that REPRESENTATION is set to JOINTS (this is just to speed up the process) and that MAX_NEWTON_ITERATIONS is set to 50. The execute
- Alternatively, the atlas can be triangulated to obtain a smoother plot
- We can also determine the path between two points on the configuration space (note that collisions are not considered here because they are not defined in the world file).
- An alternative way to plan (also without considering collisions).
Definition in file FiveBars.world.
Follow us!