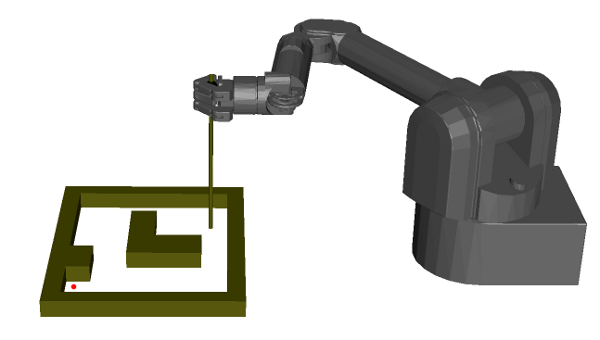
The Barret arm holding a stick to solve a simple maze problem with the orientation of the end effector fixed.
Note that in this example we do not take into account the joint limits. They can be activated, though, uncommenting the corresponding lines.
The key data for this problem is:
| Ambient space dimension | 9 |
| Configuration space dimension | 3 |
| Average planning time with bin/cuikatlasrrt (in seconds) | 0.5 |
This example is treated following this steps (from the main CuikSuite folder):
- Solve the path planning problem: Execute
- An alternative way to plan: For this, deactivate the bifurcation detection (set DETECT_BIFURCATIONS to 0) and execute:
- An alternative ways to plan existing in the literature: Note that different path planning algorithms use different parameter settins. Just uncomment the right lines in the parameter file.
- To generate an optimal path: The path is only optimal is the appropriate set of parameters is used and in the long run.
- An alternative way to generate an optimal path:
- Visualize the path: Whatever the procedure used to plan
- scripts/cuikplayer examples/Barret/BarretArm-SimpleMaze-FixRot examples/Barret/BarretArm-SimpleMaze-FixRot_path
- To smooth an output path:
- Visualize the smoothed path:
- scripts/cuikplayer examples/Barret/BarretArm-SimpleMaze-FixRot examples/Barret/BarretArm-SimpleMaze-FixRot_spath
Definition in file BarretArm-SimpleMaze-FixRot.world.
Follow us!