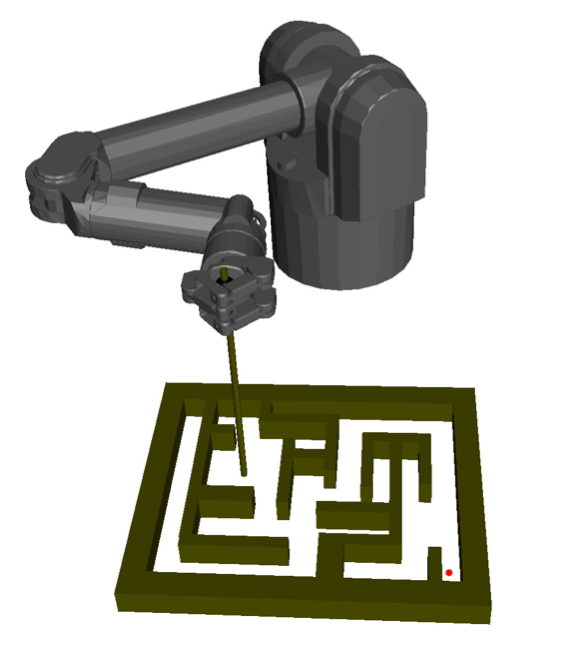
The Barret arm holding a stick to solve a maze problem with the orientation of the end effector fixed.
This examples is used in the TRO paper.
The key data for this problem is:
| Ambient space dimension | 9 |
| Configuration space dimension | 3 |
| Average planning time with bin/cuikatlasrrt (in seconds) | 2.5 |
This example is treated following this steps (from the main CuikSuite folder):
- Solve the path planning problem Execute
- An alternative way to plan: Note that different path planning algorithms use different parameter setting. Just uncomment the right lines in the parameter file. In particular, deactivate the bifurcation detection (set DETECT_BIFURCATIONS to 0 in the parameter file) and execute:
- An alternative ways to plan existing in the literature:
- Visualize the path: Whatever the procedure used to plan
- scripts/cuikplayer examples/Barret/BarretArm-Maze-FixRot examples/Barret/BarretArm-Maze-FixRot_path
- To smooth an output path:
- Visualize the smoothed path:
- scripts/cuikplayer examples/Barret/BarretArm-Maze-FixRot examples/Barret/BarretArm-Maze-FixRot_spath
Definition in file BarretArm-Maze-FixRot.world.
Follow us!